|
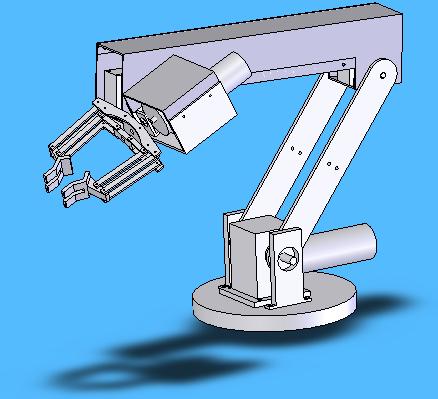
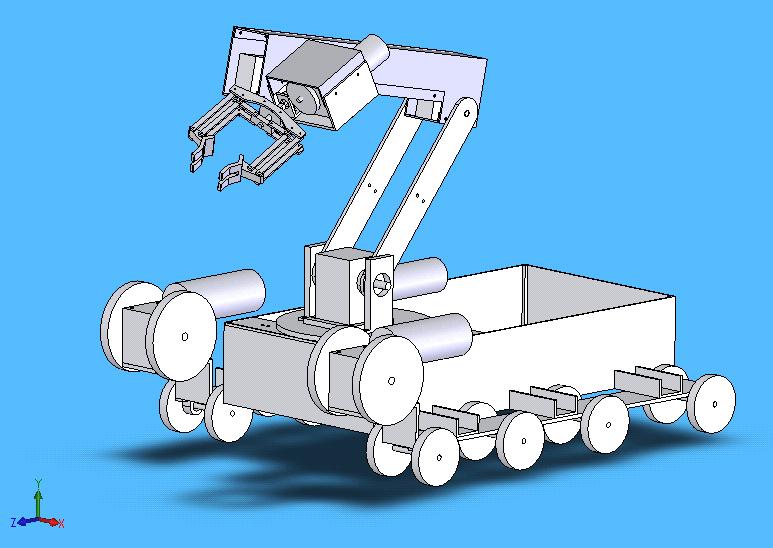
ATVRM is a remotely operated all-terrain vehicle with a five-degree of freedom robotic manipulator. My task was to outline the mechanical design of the robot within certain specifications, such as the maximum weight of the entire system, minimum weight it has to carry in the fully extended arm position, maximum length of the arm from the vehicle base to the tip of the gripper, ground clearance, maximum opening of the gripper, maximum width and length of the system etc.
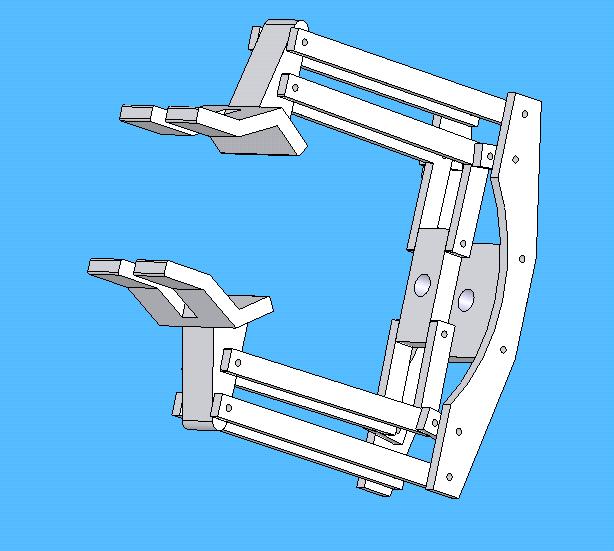
I had to find out motors available in the market, and use them to make a CAD model of the ATVRM. I love such situations, where a lot of problem statements are open-ended. Some parts of the system, such as the robotic arm, were simple and I just had to calculate the torque required from static and dynamic balance equations and had to find out the motors according to these values within some safety factors. But the most challenging part was the design of the gripper. The first challenge was the mechanism design. This part of the robot had two motors, one for enabling roll (rolling of the wrist with respect to the arm) to the gripper and another to enable opening and closing of the gripper. I synthesized a six-link mechanism as the gripper. The following picture shows the gripper mechanism.
Another challenging part was to select an appropriate motor for making the vehicle climb upto 45 degree inclined stairs as well as moving at a reasonable good speed in plains. I solved the problem by using a two-speed solenoid controlled gearbox for the motor. In plain ground, the motor would run at the speed of 400 rpm, and while climbing a stair the gear ratio is varied to 10 rpm using a solenoid controlled gearbox. Thus, the system could achieve a maximum speed of 15 kilometers per hour on plain ground.
|