| |
Projects
I have worked on a few projects and made seven working models successfully. However a number of others were initiated, but lost motivation/funds to complete them. The following is a comprehensive account of all the work that I have done. If you want more information about any particular project, then please click on the Picture.
Hardware Projects
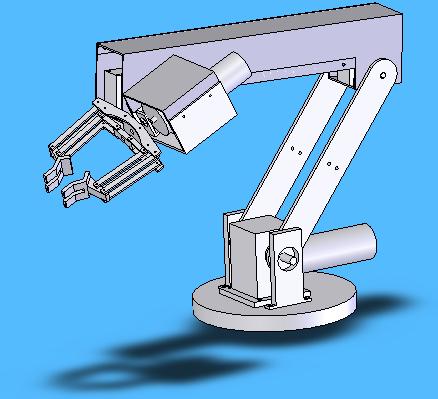 |
ATVRM is a remotely operated all-terrain vehicle with a five-degree of freedom robotic manipulator. My task was to outline the mechanical design of the robot within certain specifications, such as the maximum weight of the entire system, minimum weight it has to carry in the fully extended arm position, maximum length of the arm from the vehicle base to the tip of the gripper, ground clearance, maximum opening of the gripper, maximum width and length of the system etc.
|
 |
Adaptive front lighting system (AFS) redirects low-beam headlamp units individually in a horizontal direction in accordance with the steering angle and vehicle speed. As a result, these systems can improve visibility during the night in hilly roads, ensuring safer driving. This project is being developed by International Center for Automotive Technology, Manesar (NATRIP) under a Ministry of Shipping, Road Transport and Highways(MORTH) grant. |
 |
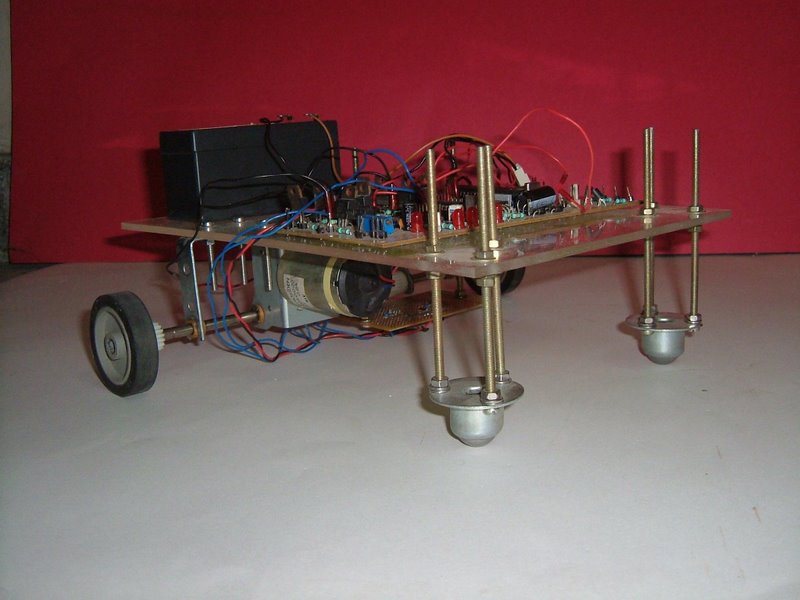
The project is under developement currently. It consists of a differentially driven WMR mounted with a sonar to perform ranging. The ultrasonic range finder (SRF08) by devantech is being used for ranging purpose. The robot will plan its path from a given initial point to a desired point or a serier of way points in an environment filled with unknown obstacles. Dr. J. Borenstein's Virtual Force field and VHF algorithms are implemented for path planning purpose. Currently, the localization will be done only on the basis of feedback from odometric data. The error accumulated in odometric sensing method is neglected. In future another localization technique (compass/active beacon) may be coupled with odometric data to get more accurate results. |
|
|
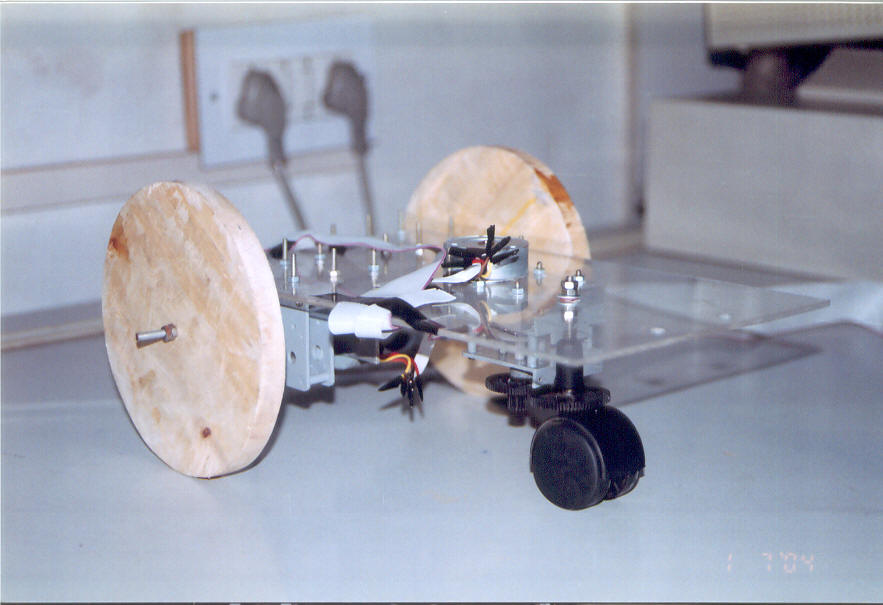
ENDEAVOR is a Car type-Wheeled Mobile Robot (WMR) used as a platform to test various time varrying control strategies. Different feedback control strategies were developed for a Car type-WMR and simulated in Matlab using ode23 solver. The successfuly control strategies were selected to be implemented in the physical model. The control strategies were programmed in C++ to generate the required Linear velocity function and Steering angle function. These were in turn converted to the required vehicle parameters and finally the wheels were driven in the desired relative speeds with respect to each other to achieve the objective. The WMR uses stepper motors as actuators and a tricycle type drive configuration. Since no actual feedback sensor was used in the system, the feedback was simulated from odometric calculations, assuming the vehicle motion was perfect. The mechanical system of ATVRM consists of a tracked wheel platform carrying a 5-degree of freedom robotic arm. Following are the pictures of the 3D CAD models (Solidworks) of complete arm assembly and gripper assembly. |
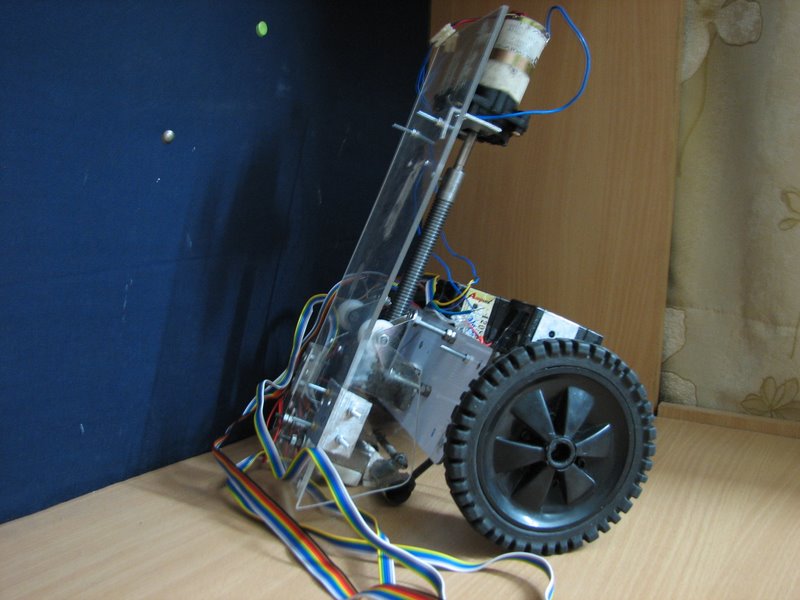 |
SNAIL is a small stair climbing mechanism for indoor environments. On even floor it drives with a differential-drive. It can change its length with the help of a lead screw mechanism, which enables it to climb in Stairs of 10 cm height. The system was originally designed to participate in a competetion to climb stairs of 10 cm height and had to fit in a box of 30/30/30 cms. The wheel diameter had to be of less than 15 cms. It was one of the objectives for the design to use as few actuators as possible. A bigger version of the model is being designed to climb in stairs of size encountered in real life.
|
 |
I have worked in Appin Knowledge Solutions, a company providing educational training and consultancy, where I designed a 24-hour workshop course and kit to create a black line following robot using 8051 microcontroller, infrared sensors and DC motors. The course contains the theory and practicals of the above components. The kit contains all the relevant components associated with the course. The course involves making of a ‘black line following robot’ from scratch.
|
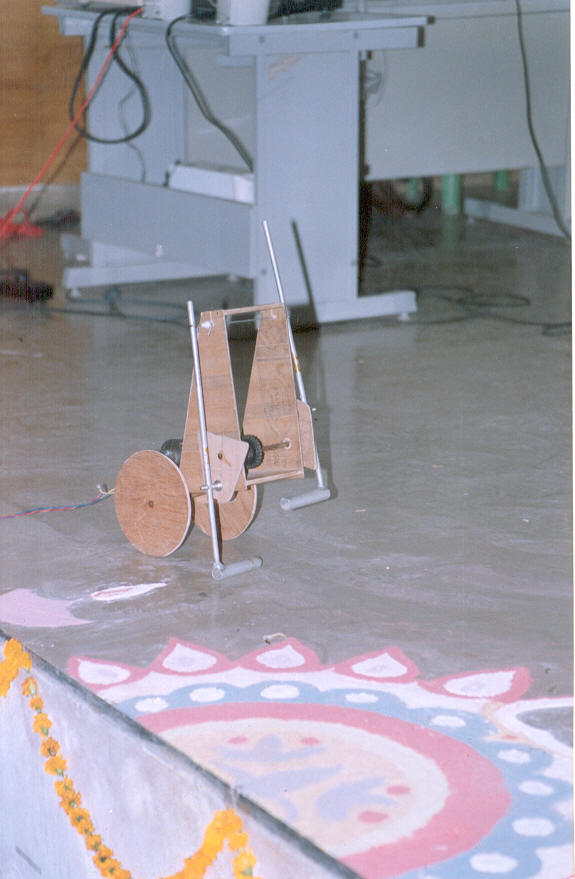 |
Scepter, is a simple walking mechanism, which was the first project that I did while pursuing engineering. The CAD model of Scepter and ANIMATION is made in IDEAS and the kinematic analysis of the mechanism is done. |
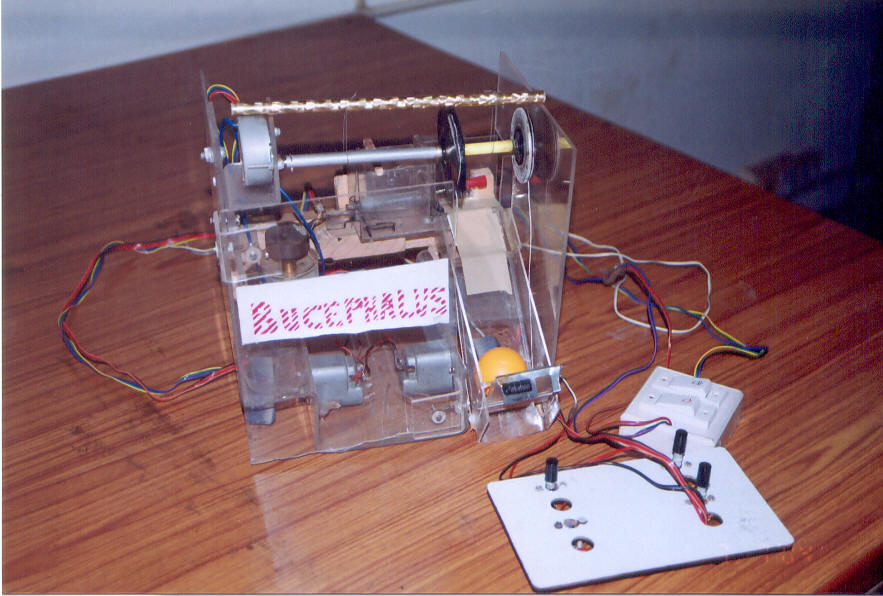 |
Bucephalus is a remotely controlled ball picking and firing at a target system created to participate of a technical event "YANTRIKI" which was organised at Indian Institute of Technology, Bombay in year 2004 during an annual technical event, TECHFEST. |
 |
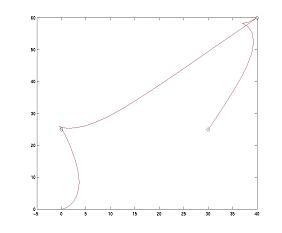
The System's Objective is to reach a desired location in a two dimensional plane from a given location and draw a desired curve on a paper.
The two link arm achieves the desired motion between two positions by appropriate movement of angle or each actuators, which in turn rotate the links connected to them. The actuators recieve the driving control signals from the computer via the parallel port. The signal from the parallel port is fed to the stepper motor driver circuit, which in turn rotates the stepper motors. To move between desired positions, first the desired angels of each link is calculated by inverse kinematics. C++ programming language was used for this computation and also to translate the angle values to the stepper motor signals, which rotates the stepper motors (actuators) by desired angle. |
Simulation Projects
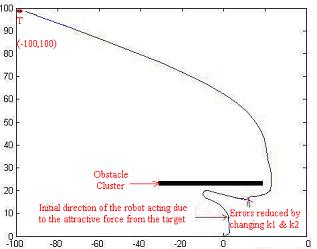 |
The aim of the project is to simulate the path of an autonomous wheeled mobile robot using the Virtual Force Field (VFF) method developed by Dr J. Borenstein, to reach a desired destination starting from a known position in an environment filled with unknown obstacles. |
 |
The objective is to develop an appropriate kinematic model of a WMR and test various time varying feedback control algorithms on this model to control its motion from a given starting position to the desired goal. Various control strategies are reviewed and compared for trajectory tracking and posture stabilization in an environment free of obstacles. From the comparison of the obtained results, guidelines are provided for WMR end users. Three different kinematic models are developed in the following work and tested in MATLAB. |
HOME
PROJECTS
RESUME
PUBLICATIONS
PHILOSOPHY
|